TMC 5160
Основные параметры
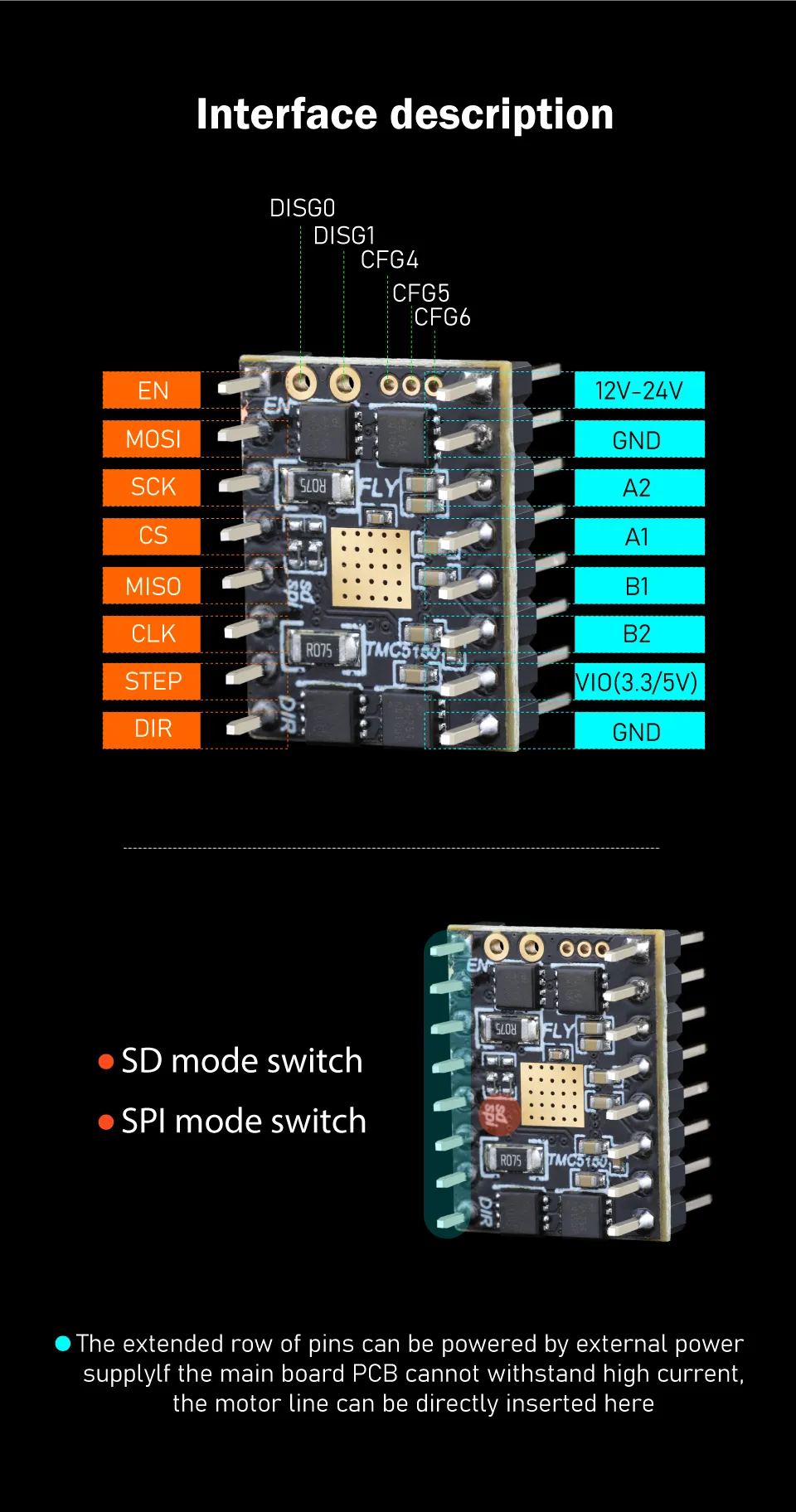
- Входное напряжение: 12В-24В
- Максимальный ток: 4.4А
- Совместимость: Marlin/Klipper/RRF прошивки
- Поддерживаемые режимы работы: TMC:SPI
- Интерфейс шаг/направление с интерполяцией микрошагов microPlyer
- Максимальное разрешение - 256 микрошагов
- Поддержка бесшумной работы и плавных движений stealthChop2
- Поддержка подавления резонанса средних частот
- Поддержка spreadCycle высокодинамичного управления двигателем
- Поддержка dcStep управления скоростью в зависимости от нагрузки
- Поддержка stallGuard2 высокоточного бесконтактного обнаружения нагрузки двигателя
- Поддержка coolStep управления током с экономией до 75%
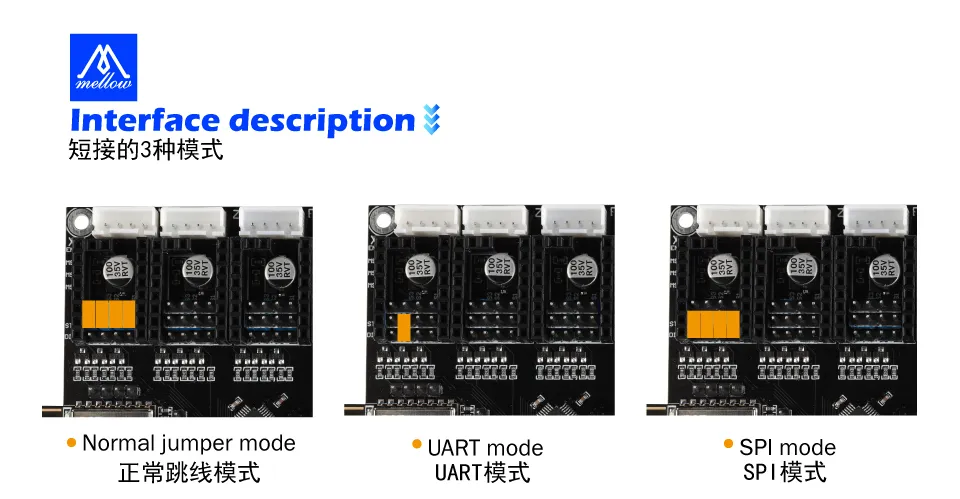
Описание джамперов на плате
- TMC5160 использует SPI-джамперы
- SPI-пин для FLY драйвера находится слева, четвертый сверху вниз, CS-пин совпадает с SPI-пином. Если пины на плате не соответствуют, SPI не будет работать
Пример конфигурации TMC5160
осторожно
- Сопротивление датчика тока установлено на
sense_resistor: 0.075, пожалуйста, не устанавливайте неправильное значение - Выбор между spi_bus и spi_software
Пример конфигурации в режиме SPI
[tmc5160 stepper_x]
cs_pin:
spi_bus:
# spi_software_mosi_pin:
# spi_software_miso_pin:
# spi_software_sclk_pin:
run_current: 1.0 # Значение тока для работы двигателя
interpolate: False # Включить интерполяцию на 256 микрошагов (True для включения, False для выключения)
sense_resistor: 0.075
stealthchop_threshold: 0
driver_DISS2G: 1
driver_DISS2VS: 1
Использование безконечного стопа
Подсказки по использованию бесконечного положения
- Использование бесконечного положения требует занятия одного ограничительного порта, обычно первый приводной порт использует IO1, второй - IO2 и так далее
- При использовании бесконечного положения обратите внимание, пожалуйста, не подключайте ничего к соответствующему ограничительному порту
- На некоторых основных платах FLY прямое подключение к приводному порту, обратите внимание, подключен ли DIAG напрямую к соответствующему выводу
Советы по использованию безконечного стопа
- Для использования этой функции необходимо самостоятельно припаять DIAG пин
- Старый
endstop_pin:нужно закомментировать или удалить, добавитьendstop_pin: tmc5160_stepper_x:virtual_endstop - После настройки
diag1_pin:убедитесь, что статус конечного стопа не активирован - Значение
driver_SGT: :необходимо определить экспериментально
- Пример конфигурации
[stepper_x]
# endstop_pin:PF3
endstop_pin: tmc5160_stepper_x:virtual_endstop
homing_retract_dist: 0 # Нулевое значение может привести к неудаче при возврате домой
[tmc5160 stepper_x]
diag1_pin: ^!
driver_SGT: 1
# Убедитесь, что статус конечного стопа не активирован
# Этот пин обычно использует префикс "^" для включения внутреннего подтягивающего резистора
# Чувствительность зависит от натяжения ремня, требуется настройка
# (Убедитесь, что установлено driver_SGTHRS на подходящую чувствительность)