TMC 2240
Основные параметры
- Входное напряжение: 12В-36В
- Подходит для: Klipper/RRF прошивки
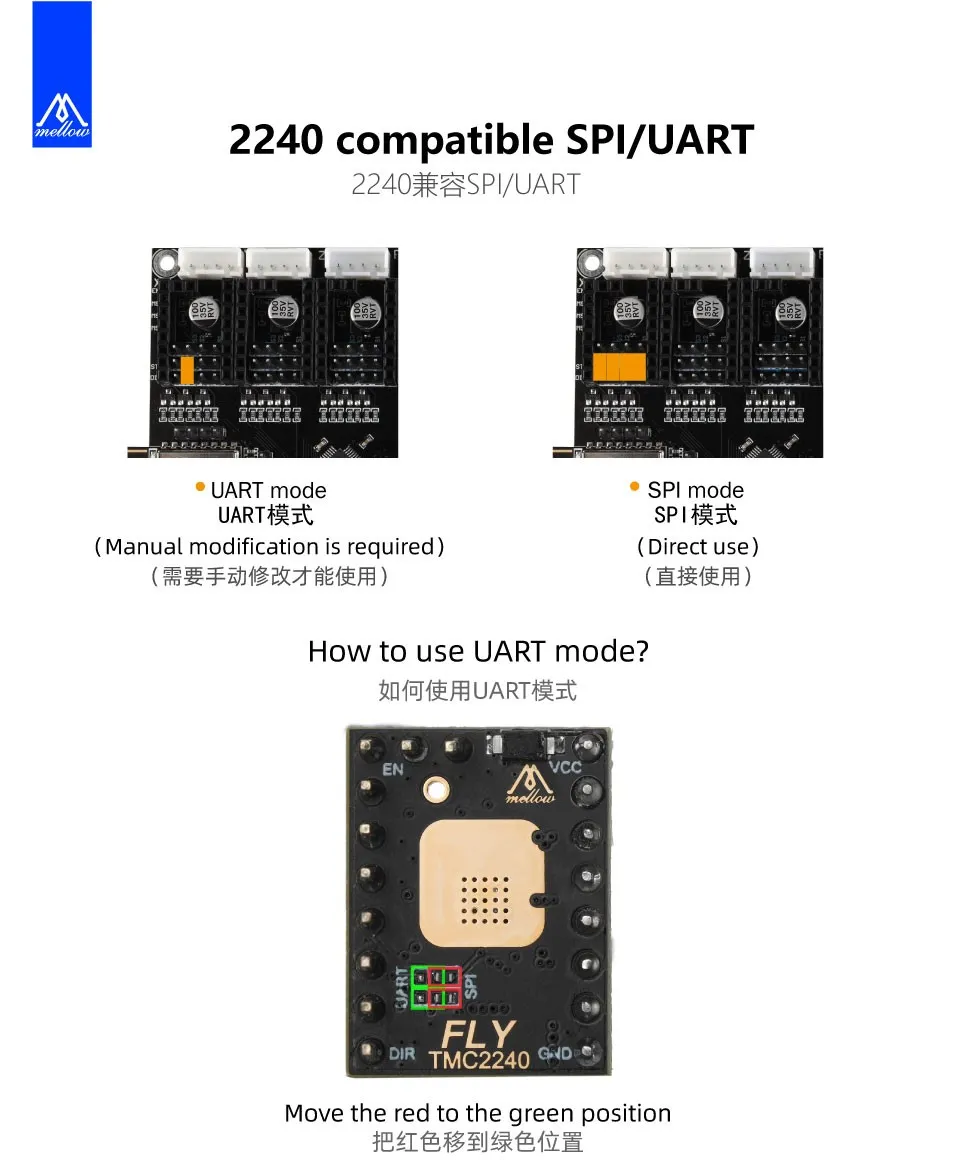
- Поддержка режимов управления: TMC:SPI/UART
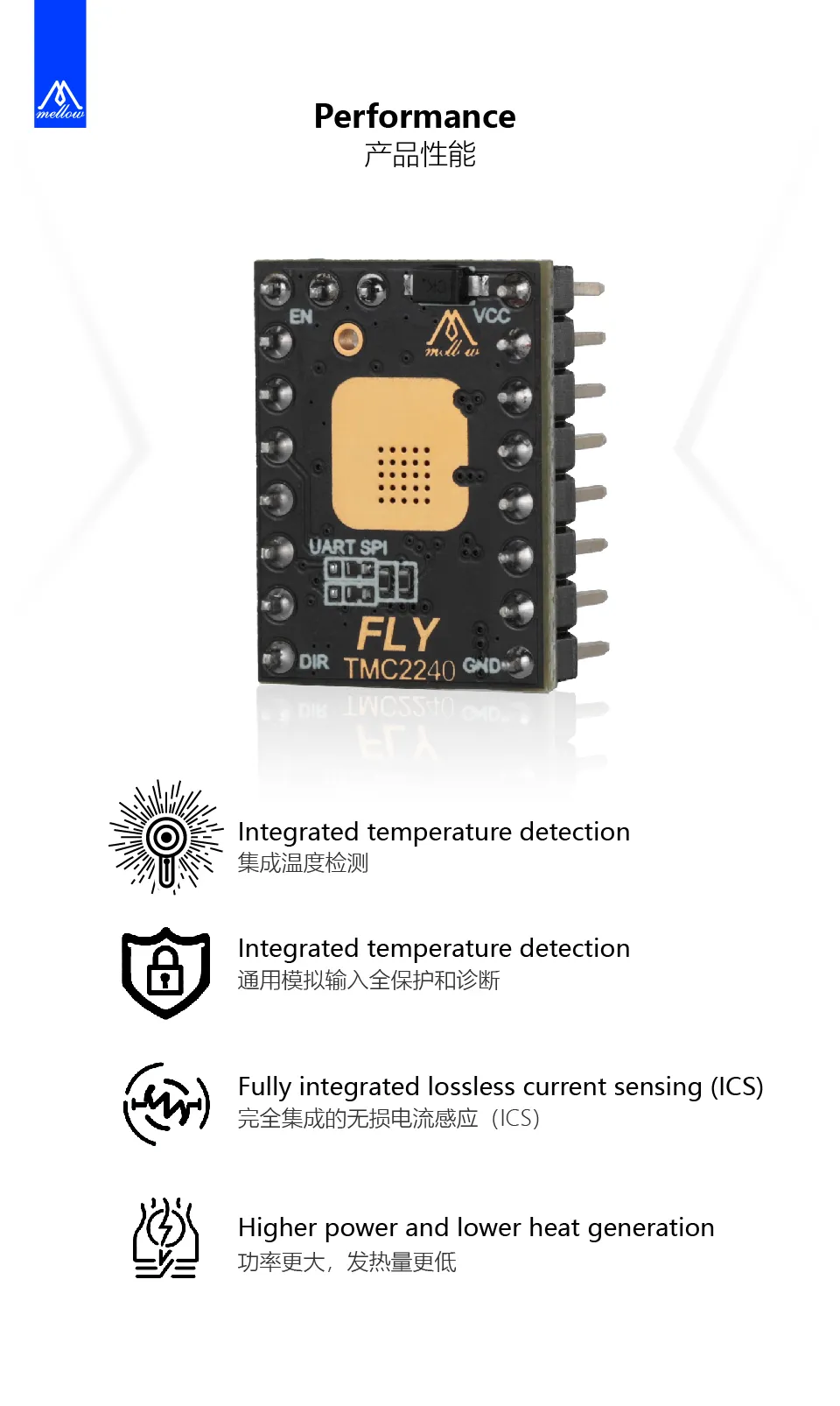
- Интегрированный контроль температуры
- Полная защита и диагностика универсального аналогового входа
- Полностью интегрированное бесконтактное измерение тока (ICS)
- Интерфейс шагов/направления с микрошаговой интерполяцией microPlyer
- Защита от короткого замыкания, защита от пониженного напряжения, защита от перегрева чипа (тепловое отключение)
- Поддержка stallGuard2 для высокоточного бесконтактного измерения нагрузки двигателя
- Интегрированный StallGuard2 и StallGuard4 для бесконтактного измерения нагрузки двигателя
- Без вибраций комбинация StealthChop и SpreadCycle, решает проблему дрожания двигателя в точках переключения режимов шопинга.
- Более высокая мощность, меньший нагрев. (Поддерживает более высокое напряжение, 3.0AMAX, подходит для 3D-печати в более широком спектре применений, а также для более длительной работы без перегрева и повреждений.)
Объяснение джамперов на плате
- TMC2240 по умолчанию использует джампер SPI
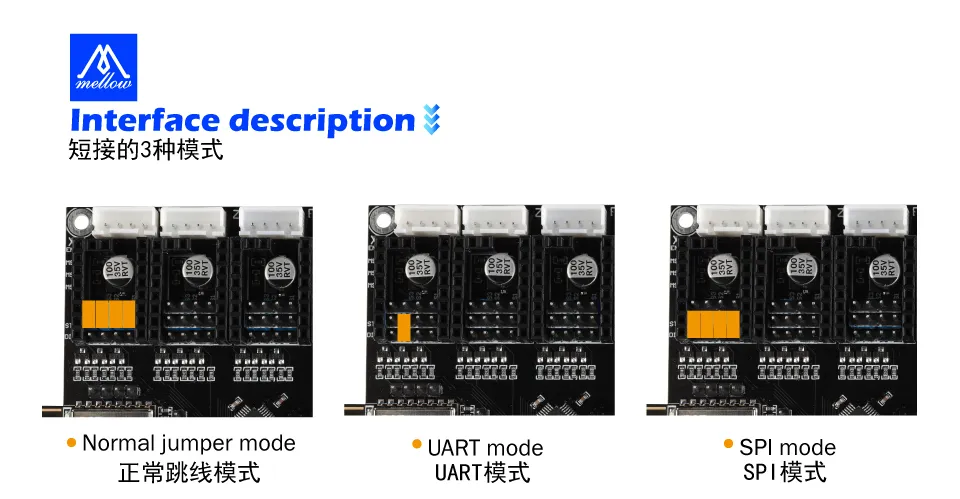
- Метод использования джампера UART для TMC2240
Пример конфигурации TMC2240
осторожно
Сопротивление драйвера rref: 12300 не должно быть установлено неправильно
Пример конфигурации в режиме SPI
[tmc2240 stepper_x]
cs_pin:
spi_bus:
run_current: 0.65 # Ток работы двигателя
interpolate: False # Включить ли интерполяцию на 256 микрошагов (не рекомендуется)
rref: 12300
stealthchop_threshold: 0 # Порог тихого режима (если не требуется тихий режим, установите значение в 0)
Пример конфигурации в режиме UART
[tmc2240 stepper_x]
uart_pin:
run_current: 0.65 # Ток работы двигателя
interpolate: False # Включить ли интерполяцию на 256 микрошагов (не рекомендуется)
rref: 12300 # Сопротивление драйвера
stealthchop_threshold: 0 # Порог тихого режима (если не требуется тихий режим, установите значение в 0)
-
В случае возникновения следующей ошибки

-
Необходимо зайти в SSH терминал под пользователем, у которого установлен klipper, и выполнить следующий код
sed -i 's/"uart_pin"/\'"'"'uart_pin'\''/g' ~/klipper/klippy/extras/tmc2240.py
Использование бесконечных концевиков
Подсказки по использованию бесконечного положения
- Использование бесконечного положения требует занятия одного ограничительного порта, обычно первый приводной порт использует IO1, второй - IO2 и так далее
- При использовании бесконечного положения обратите внимание, пожалуйста, не подключайте ничего к соответствующему ограничительному порту
- На некоторых основных платах FLY прямое подключение к приводному порту, обратите внимание, подключен ли DIAG напрямую к соответствующему выводу
Совет по использованию бесконечных концевиков
- Исходный
endstop_pin:должен быть закомментирован или удален, добавьтеendstop_pin: tmc2240_stepper_x:virtual_endstop - После настройки
diag0_pin:состояние концевика будет неактивным - Настройка
driver_SGT:требует самостоятельного тестирования подходящего значения, обычно1
- Пример конфигурации
[stepper_x]
# endstop_pin:PF3 # Исходный концевик должен быть закомментирован или удален
endstop_pin: tmc2240_stepper_x:virtual_endstop
homing_retract_dist: 0 # Откат к нулю может привести к ошибке возврата домой
[tmc2240 stepper_x]
diag0_pin: ^!PG12
driver_SGT: 1