TMC 2240
기본 매개변수
- 입력 전압:12V-36V
- 적용 가능: Klipper/RRF 펌웨어
- 드라이브 모드 지원:TMC:SPI/UART
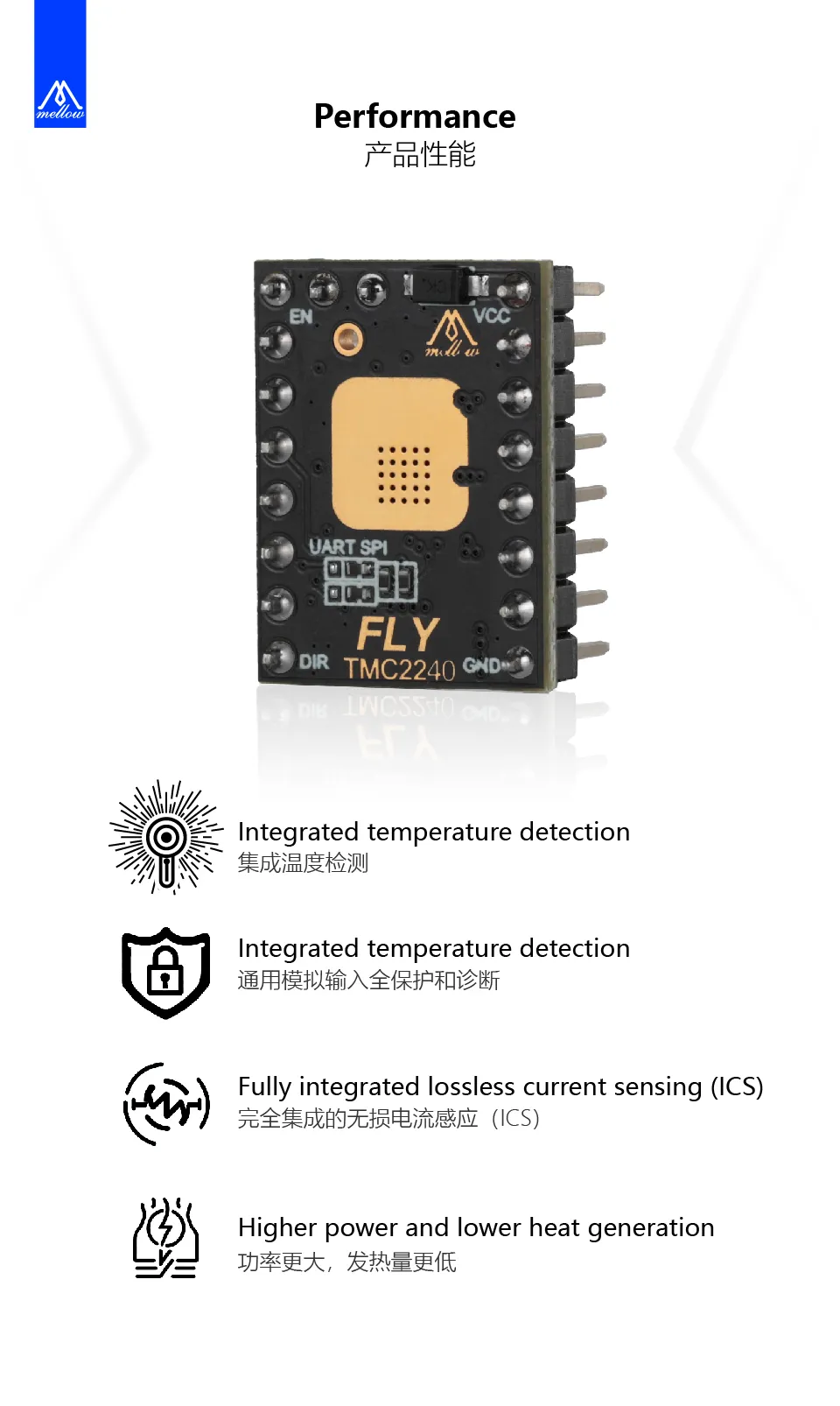
- 통합 온도 감지
- 범용 아날로그 입력 전체 보호 및 진단
- 완전히 통합된 무손실 전류 감지 (ICS)
- 마이크로 스텝 보간 microPlyer 포함 스텝/방향 인터페이스
- 단락 보호, 저전압 잠금, 칩 과열 보호(열 차단)
- stallGuard2 고정밀 센서리스 모터 부하 감지 지원
- 통합 StallGuard2 및 StallGuard4 센서리스 모터 부하 감지
- StealthChop 및 SpreadCycle의 무진동 조합, 모터의 점프 문제 해결.
- 더 큰 전력, 낮은 발열(더 큰 전압 지원, 3.0AMAX, 3D 프린팅 분야에서 더 넓은 범위 사용 가능, 장시간 작업 시 발열 및 손상이 적음.)
메인보드 점퍼 설명
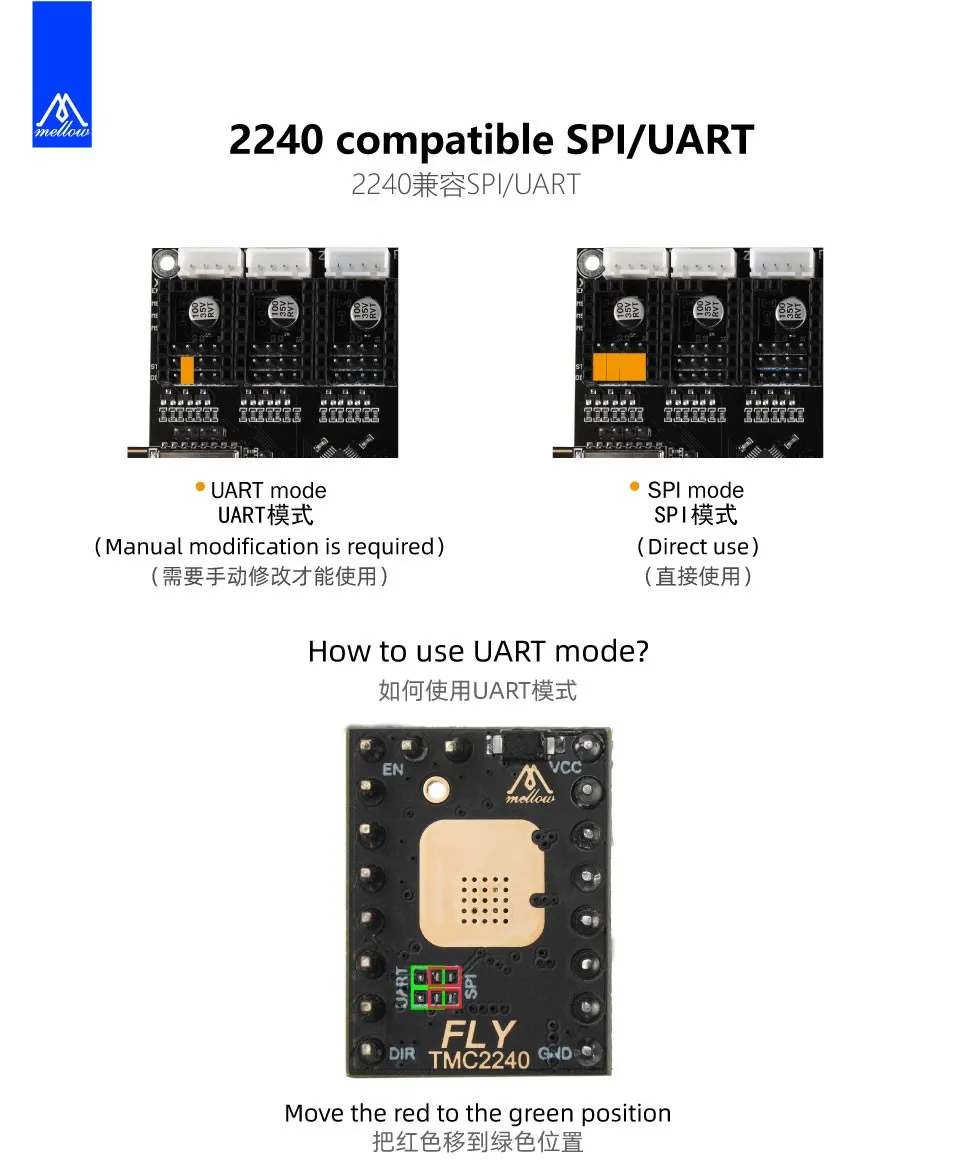
- TMC2240 기본적으로 SPI 점퍼 사용
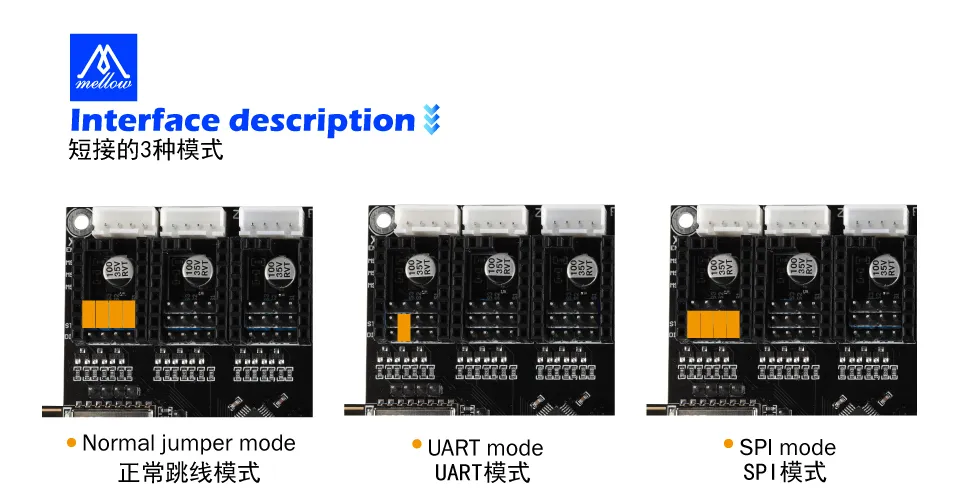
- TMC2240 UART 점퍼 사용 방법
TMC2240 참조 설정
위험
드라이버 샘플링 저항은 rref: 12300로 설정하세요.
SPI 모드 참조 설정
[tmc2240 stepper_x]
cs_pin:
spi_bus:
run_current: 0.65 # 모터 운행 전류 값
interpolate: False # 256 마이크로 스텝 보간 활성화 여부(활성화 권장하지 않음)
rref: 12300
stealthchop_threshold: 0 # 무음 임계값(무음이 필요하지 않으면 값을 0으로 변경)
UART 모드 참조 설정
[tmc2240 stepper_x]
uart_pin:
run_current: 0.65 # 모터 운행 전류 값
interpolate: False # 256 마이크로 스텝 보간 활성화 여부(활성화 권장하지 않음)
rref: 12300 # 드라이버 샘플링 저항
stealthchop_threshold: 0 # 무음 임계값(무음이 필요하지 않으면 값을 0으로 변경)
-
아래와 같은 오류가 발생하면

-
klipper가 설치된 사용자로 SSH 터미널에서 로그인 후 이 코드를 실행해야 합니다.
sed -i 's/"uart_pin"/\'"'"'uart_pin'\''/g' ~/klipper/klippy/extras/tmc2240.py
무한정 사용 설명
무한 위치 사용 팁
- 무한 위치 사용은 하나의 한계 포트를 사용해야 합니다. 일반적으로 1번 드라이브 위치에서는 IO1을 사용하고, 2번 드라이브 위치는 IO2를 사용하는 식으로 진행됩니다.
- 무한 위치를 사용할 때 주의할 점은, 해당 한계 포트에 아무것도 연결하지 말아야 합니다.
- FLY 일부 메인보드는 드라이브 포트에 직접 연결되어 있습니다. DIAG가 해당 핀에 직접 연결되어 있는지 확인하세요.
무한정 사용 팁
- 원래
endstop_pin:은 차단하거나 삭제하고,endstop_pin: tmc2240_stepper_x:virtual_endstop를 추가해야 합니다. diag0_pin:을 설정한 후, 한계 상태를 새로 고침하면 트리거되지 않음.driver_SGT:설정은 적절한 값을 테스트하여야 하며, 일반적으로1입니다.
- 참조 설정
[stepper_x]
# endstop_pin:PF3 # 원래 한계 포트를 차단하거나 삭제해야 합니다.
endstop_pin: tmc2240_stepper_x:virtual_endstop
homing_retract_dist: 0 # 0으로 설정하지 않으면 홈 설정이 실패할 수 있음
[tmc2240 stepper_x]
diag0_pin: ^!PG12
driver_SGT: 1