TMC 2209
기본 파라미터
- 입력 전압: 12V-24V
- 적용되는 펌웨어: Marlin/Klipper/RRF
- 모터가 쉽게 스텝을 놓치지 않음
- 조용한 모드 지원
- 넓은 면적의 팬 히트패드, 드라이버 작업 온도 낮춤
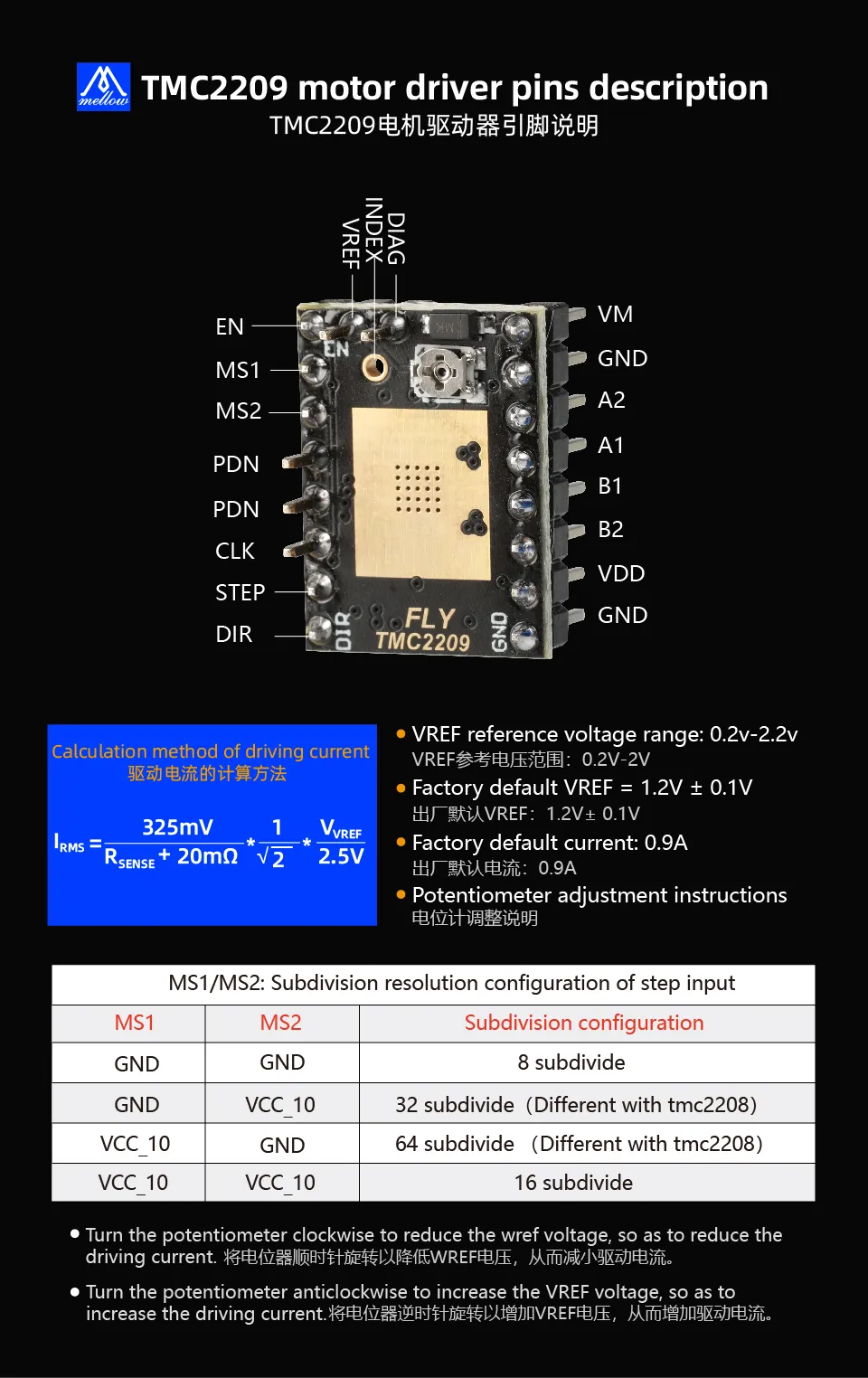
- 드라이버 모드 지원: TMC: UART
- 모터 정지 감지 지원
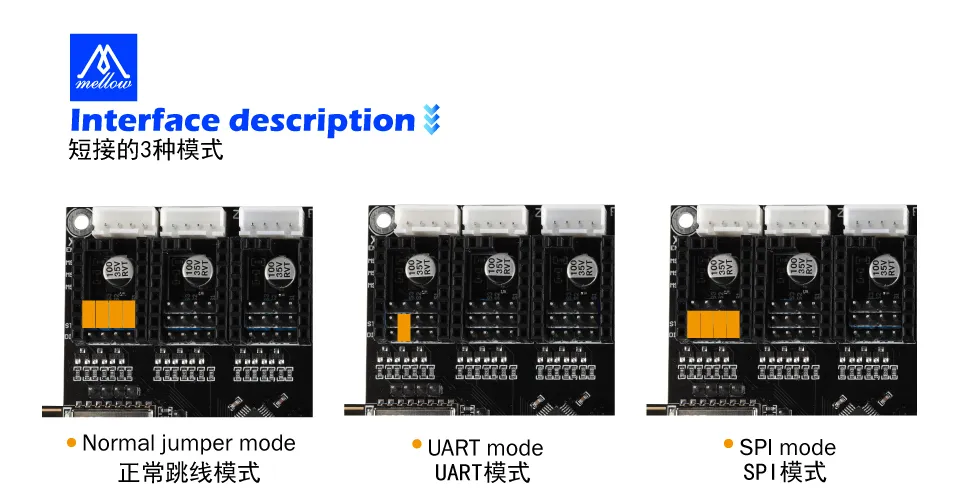
메인보드 점퍼 설명
-
TMC2209는 UART 점퍼를 사용합니다.
-
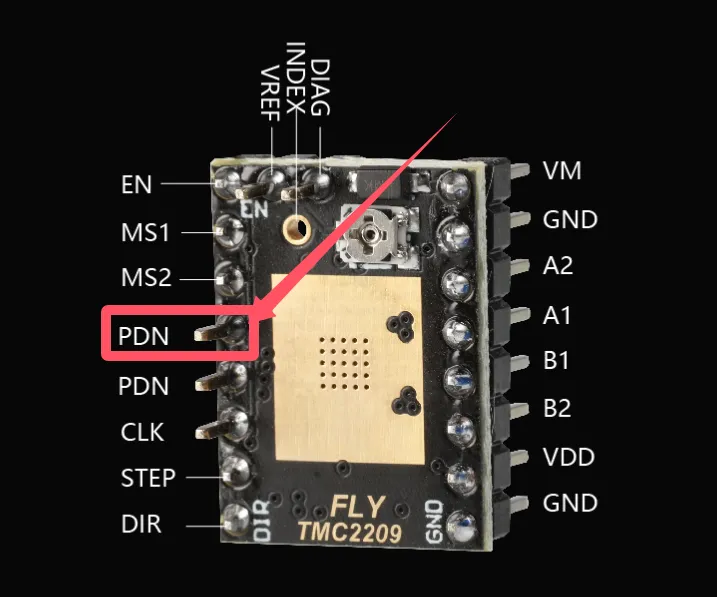
FLY 드라이버의 UART 핀은 왼쪽에서 아래로 네 번째 핀, PDN 핀이 UART 핀입니다. 만약 메인보드가 해당 핀과 일치하지 않으면 UART를 사용할 수 없습니다.
-
다른 드라이버가 다섯 번째 핀을 사용하는 경우, 우리 메인보드를 사용할 수 있는 방법을 참고하세요. UART 사용 불가 해결 방법
TMC2209 참조 설정
위험
드라이버 샘플링 저항은 0.110이므로 잘못 설정하지 마십시오.
[tmc2209 stepper_x]
uart_pin:
interpolate: False
run_current: 0.8 # 모터 작동 전류 값 (단위: mA)
sense_resistor: 0.110 # 드라이버 샘플링 저항을 변경하지 마십시오.
stealthchop_threshold: 0
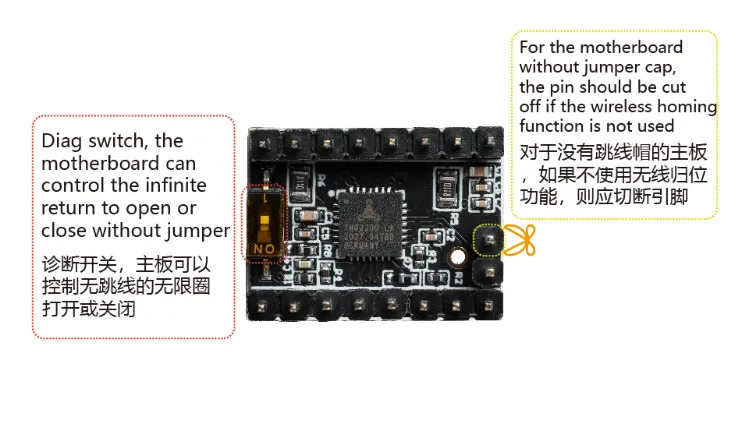
무한위치 사용 설명
무한 위치 사용 팁
- 무한 위치 사용은 하나의 한계 포트를 사용해야 합니다. 일반적으로 1번 드라이브 위치에서는 IO1을 사용하고, 2번 드라이브 위치는 IO2를 사용하는 식으로 진행됩니다.
- 무한 위치를 사용할 때 주의할 점은, 해당 한계 포트에 아무것도 연결하지 말아야 합니다.
- FLY 일부 메인보드는 드라이브 포트에 직접 연결되어 있습니다. DIAG가 해당 핀에 직접 연결되어 있는지 확인하세요.
무한위치 사용 팁
- 원래
endstop_pin:은 차단하거나 삭제해야 하며,endstop_pin: tmc2209_stepper_x:virtual_endstop를 추가해야 합니다. diag_pin:을 설정한 후, 리미트 상태를 새로고침하면 트리거되지 않습니다.driver_SGTHRS:는 적절한 값을 스스로 테스트해야 합니다.
- 참조 설정
팁
- FLY 2209 뒷면에 있는 딥 스위치를 다른 쪽으로 전환해야 합니다.
- FLY 2209C는 DIAG를 직접 연결하므로 이 단계가 필요 없습니다.
[stepper_x]
# endstop_pin:PF3
endstop_pin: tmc2209_stepper_x:virtual_endstop
homing_retract_dist: 0 # 0으로 변경하지 않으면 홈 복귀 실패할 수 있습니다.
[tmc2209 stepper_x]
diag_pin: ^
driver_SGTHRS: 100