TMC 2240
基本パラメータ
- 入力電圧 :12V-36V
- 適用範囲 : Klipper/RRF ファームウェア
- ドライブモードサポート:TMC:SPI/UART
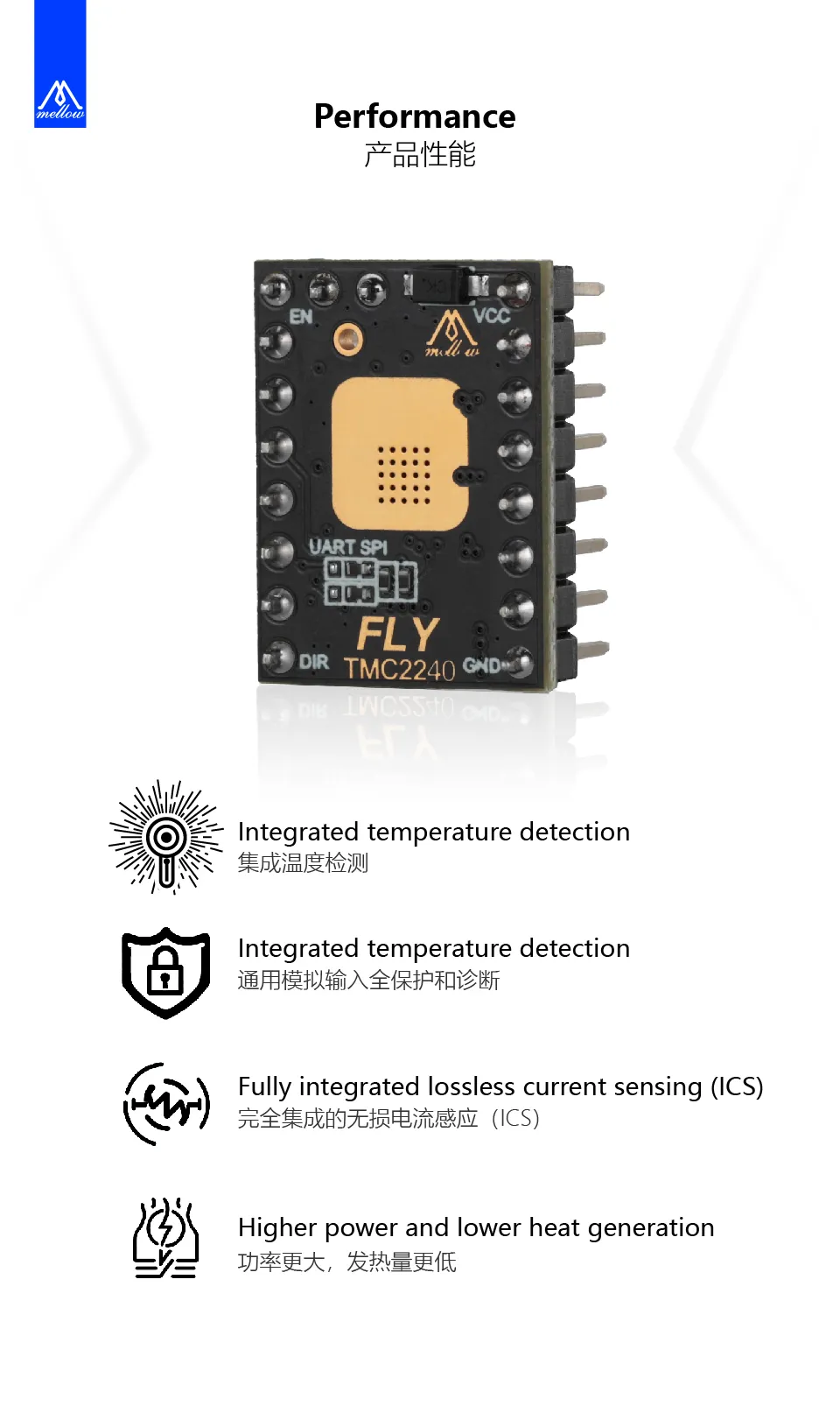
- 温度検出を統合
- 汎用アナログ入力保護と診断
- 完全統合の非破壊電流感知 (ICS)
- ステップ/方向インターフェースとマイクロステップ補間のmicroPlyer
- 短絡保護、低電圧ロック、チップオーバーヒート保護(熱遮断)
- スタルガード2高精度センサーレスモータ負荷検出をサポート
- スタルガード2およびスタルガード4のセンサーレスモータ負荷検出を統合
- ステルスチョップとスプレッドサイクルの無振動組み合わせで、チョップスイッチ速度ポイントでのモータの跳ね上がり問題を解決。
- より高い出力で、発熱量が少ない。(より高い電圧をサポートし、3.0AMAX、より広い領域の3Dプリント作業に適し、より長時間の作業でも発熱や損傷が少ない。)
メインボードジャンパ説明
- TMC2240はデフォルトでSPIジャンパを使用
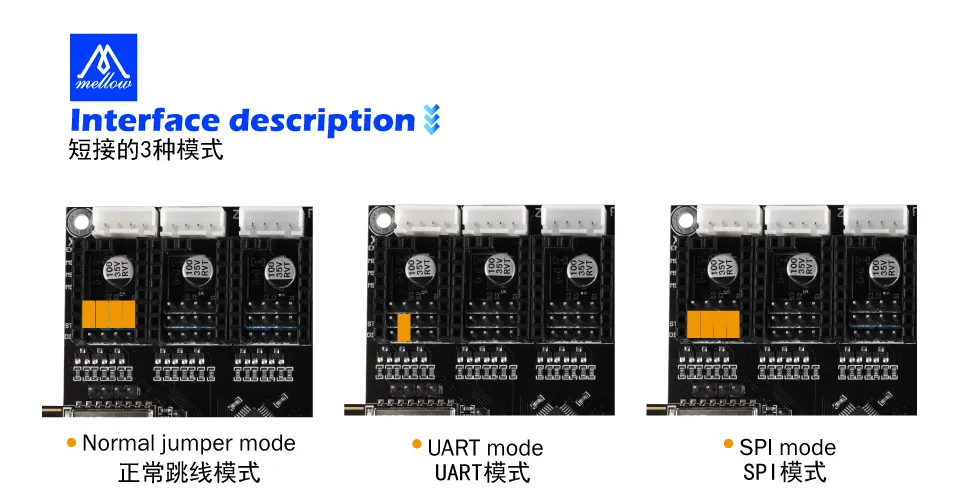
- TMC2240がUARTジャンパを使用する方法

TMC2240の参考設定
危ない
ドライバのサンプル抵抗はrref: 12300です。誤って設定しないでください
SPIモードの参考設定
[tmc2240 stepper_x]
cs_pin:
spi_bus:
run_current: 0.65 # モータの動作電流値
interpolate: False # 256マイクロステップ補間を有効にするかどうか(有効にすることを推奨しない)
rref: 12300
stealthchop_threshold: 0 # 静音閾値(静音が不要な場合は数値を0に変更してください)
UARTモードの参考設定
[tmc2240 stepper_x]
uart_pin:
run_current: 0.65 # モータの動作電流値
interpolate: False # 256マイクロステップ補間を有効にするかどうか(有効にすることを推奨しない)
rref: 12300 # ドライバのサンプル抵抗
stealthchop_threshold: 0 # 静音閾値(静音が不要な場合は数値を0に変更してください)
-
以下のエラーが発生した場合

-
KlipperがインストールされているユーザーでSSHターミナルにログインし、このコードを実行する必要があります。
sed -i 's/"uart_pin"/\'"'"'uart_pin'\''/g' ~/klipper/klippy/extras/tmc2240.py
無限位の使用説明
無限位使用ヒント
- 無限位を使用するには、限位口が一つ必要です。通常、一号ドライブ位はIO1を使用し、二号ドライブ位はIO2を使用する、といった具合に続きます。
- 無限位を使用する際には注意が必要です。対応する限位口に何も接続しないでください。
- FLYの一部マザーボードは直接ドライブポートに接続されています。DIAGが対応するピンに直接接続されているかどうかを確認してください。
無限位使用のヒント
- 元の
endstop_pin:をコメントアウトするか削除し、endstop_pin: tmc2240_stepper_x:virtual_endstopを追加します。 diag0_pin:を設定した後、リミットステータスは未トリガーになります。driver_SGT:は適切な値を自分でテストする必要があります。通常は1です。
- 参考設定
[stepper_x]
# endstop_pin:PF3 # 元のリミットポートをコメントアウトまたは削除する必要があります
endstop_pin: tmc2240_stepper_x:virtual_endstop
homing_retract_dist: 0 # 0に変更しないとホームポジションに戻る際に失敗する可能性があります。
[tmc2240 stepper_x]
diag0_pin: ^!PG12
driver_SGT: 1