TMC 2240
Paramètres de base
- Tension d'entrée : 12V-36V
- Convient pour : Firmware Klipper/RRF
- Modes de pilotage supportés : TMC : SPI/UART
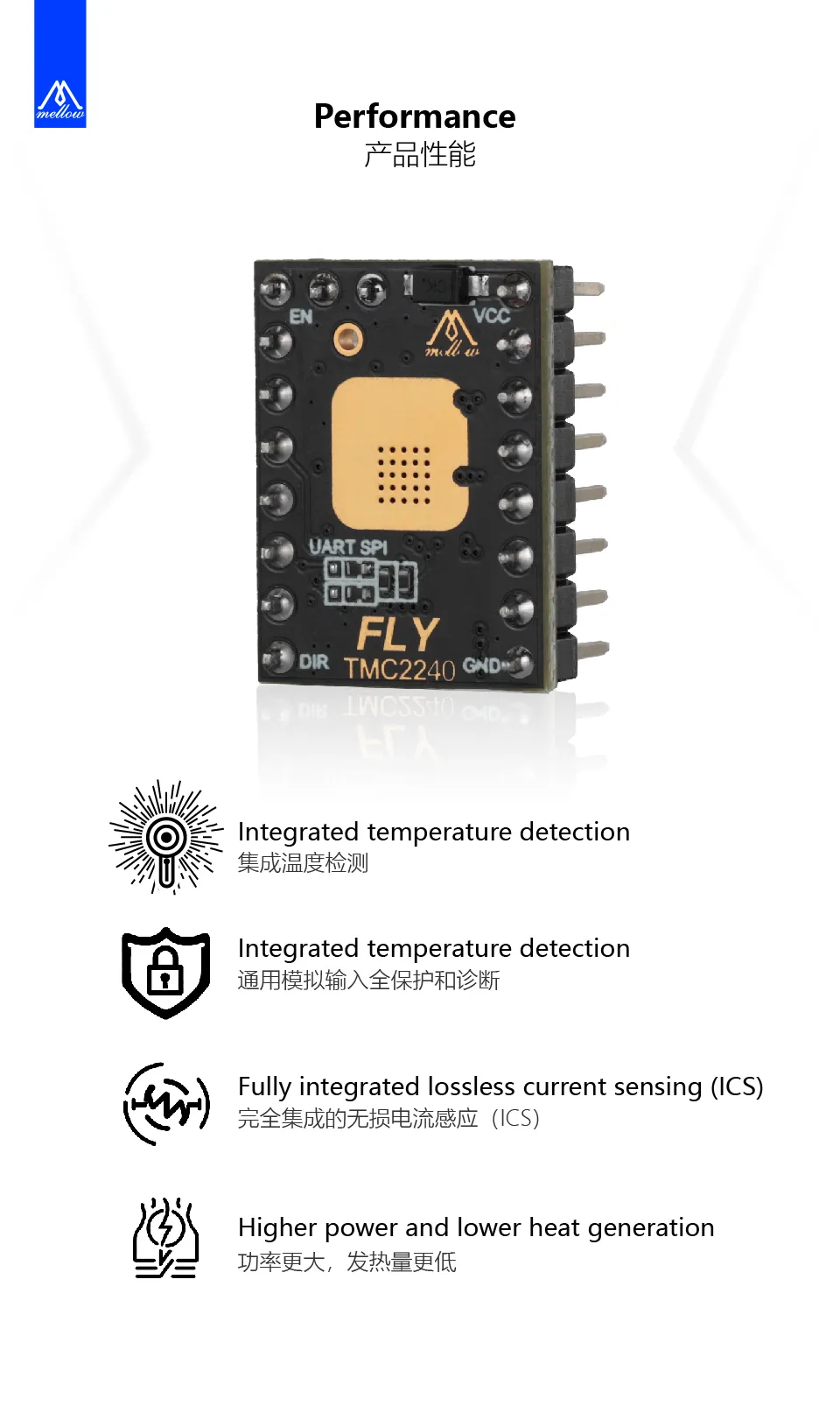
- Détection de température intégrée
- Entrée analogique universelle avec protection complète et diagnostic
- Détection de courant intégrée sans perte (ICS)
- Interface pas-à-pas/direction avec interpolation microPlyer
- Protection contre les courts-circuits, verrouillage par sous-tension, protection contre la surchauffe du chip (arrêt thermique)
- Support pour la détection de charge du moteur sans capteur de haute précision StallGuard2
- Détection de charge du moteur sans capteur intégrée StallGuard2 et StallGuard4
- Combinaison sans tremblement de StealthChop et SpreadCycle, résolvant le problème de rebond du moteur au point de commutation de la fréquence de découpage.
- Plus de puissance, moins de chaleur (supporte une tension plus élevée, 3.0AMAX, adapté à des domaines plus élevés de l'impression 3D, et fonctionne plus longtemps sans surchauffe ni dommages).
Explication des cavaliers de la carte mère
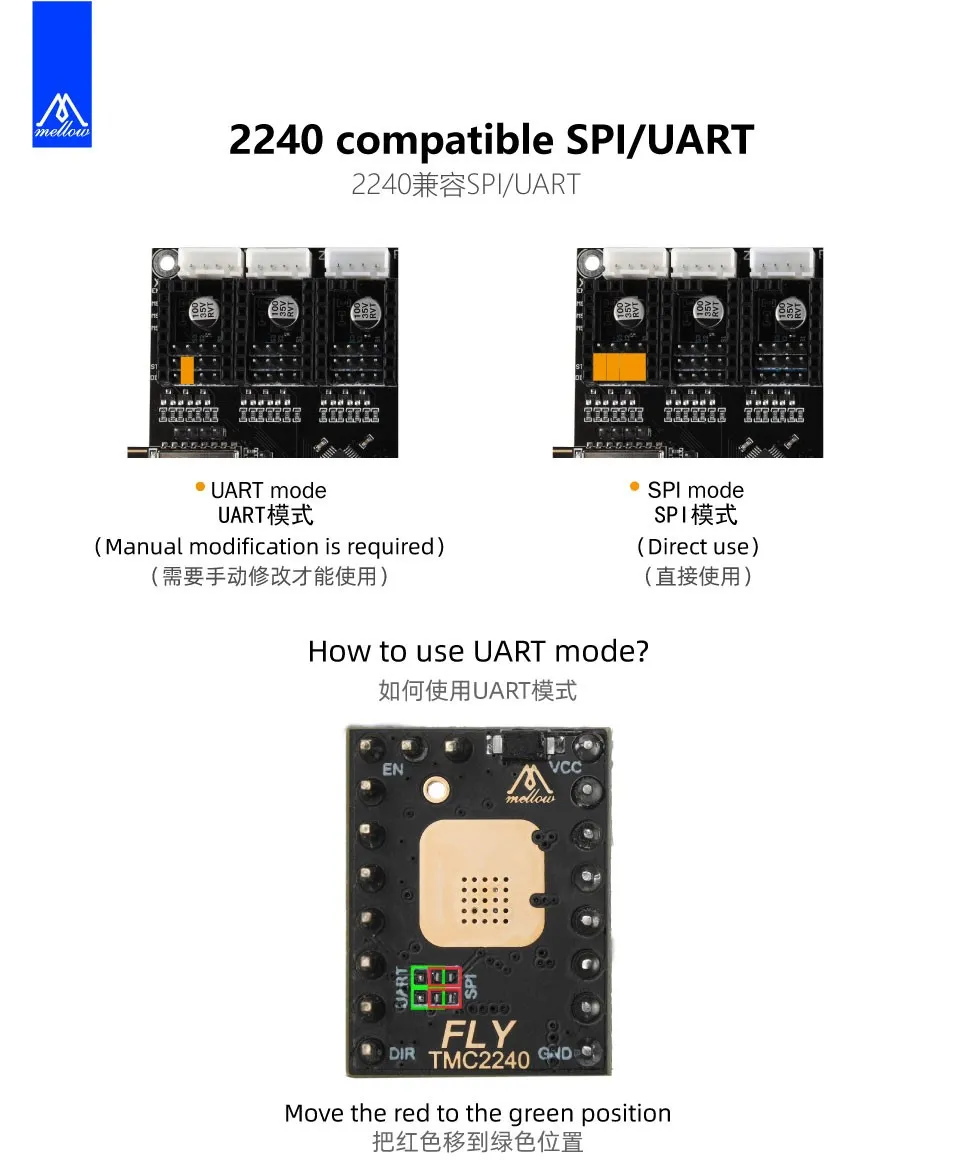
- Par défaut, TMC2240 utilise le cavalier SPI
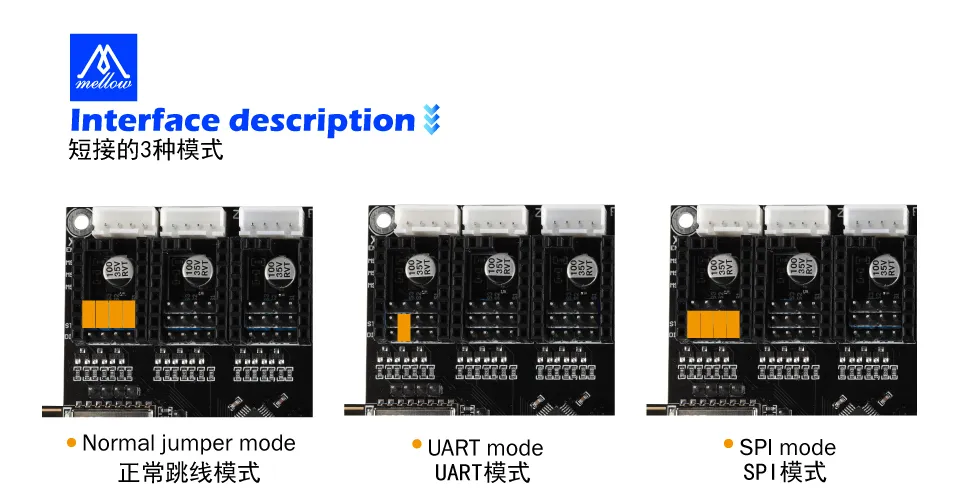
- Méthode d'utilisation du cavalier UART pour TMC2240
Configuration de référence pour TMC2240
dangereux
La résistance d'échantillonnage du pilote est rref: 12300, veuillez ne pas la configurer incorrectement
Configuration de référence en mode SPI
[tmc2240 stepper_x]
cs_pin:
spi_bus:
run_current: 0.65 # Valeur du courant de fonctionnement du moteur
interpolate: False # Activer ou non l'interpolation en 256 micro-pas (non recommandé)
rref: 12300
stealthchop_threshold: 0 # Seuil de silence (si le silence n'est pas nécessaire, changez la valeur en 0)
Configuration de référence en mode UART
[tmc2240 stepper_x]
uart_pin:
run_current: 0.65 # Valeur du courant de fonctionnement du moteur
interpolate: False # Activer ou non l'interpolation en 256 micro-pas (non recommandé)
rref: 12300 # Résistance d'échantillonnage du pilote
stealthchop_threshold: 0 # Seuil de silence (si le silence n'est pas nécessaire, changez la valeur en 0)
-
Si l'erreur suivante apparaît

-
Vous devez vous connecter en tant qu'utilisateur klipper via SSH et exécuter ce code
sed -i 's/"uart_pin"/\'"'"'uart_pin'\''/g' ~/klipper/klippy/extras/tmc2240.py
Explication de l'utilisation sans fin de course
Conseils d'utilisation de la position infinie
- L'utilisation de la position infinie nécessite l'occupation d'un port de fin de course. Normalement, la position de conduite numéro un utilise IO1, la position de conduite numéro deux utilise IO2, et ainsi de suite.
- Veuillez noter que lors de l'utilisation de la position infinie, il ne faut rien connecter aux ports de fin de course correspondants.
- Pour certaines cartes mères FLY, les ports de commande sont directement connectés. Veuillez vérifier si DIAG est directement connecté aux broches correspondantes.
Conseils pour l'utilisation sans fin de course
- Le
endstop_pin:d'origine doit être masqué ou supprimé, puis ajouterendstop_pin: tmc2240_stepper_x:virtual_endstop - Après avoir configuré
diag0_pin:, l'état de fin de course est non déclenché lors du rafraîchissement - La configuration de
driver_SGT:nécessite de tester une valeur appropriée, normalement1
- Configuration de référence
[stepper_x]
# endstop_pin:PF3 # Le port de fin de course d'origine doit être masqué ou supprimé
endstop_pin: tmc2240_stepper_x:virtual_endstop
homing_retract_dist: 0 # Un retrait différent de 0 peut entraîner un échec du retour à zéro
[tmc2240 stepper_x]
diag0_pin: ^!PG12
driver_SGT: 1