TMC 2240
基本参数
- 输入电压 :12V-36V
- 适用于 : Klipper/RRF 固件
- 驱动模式支持:TMC:SPI/UART
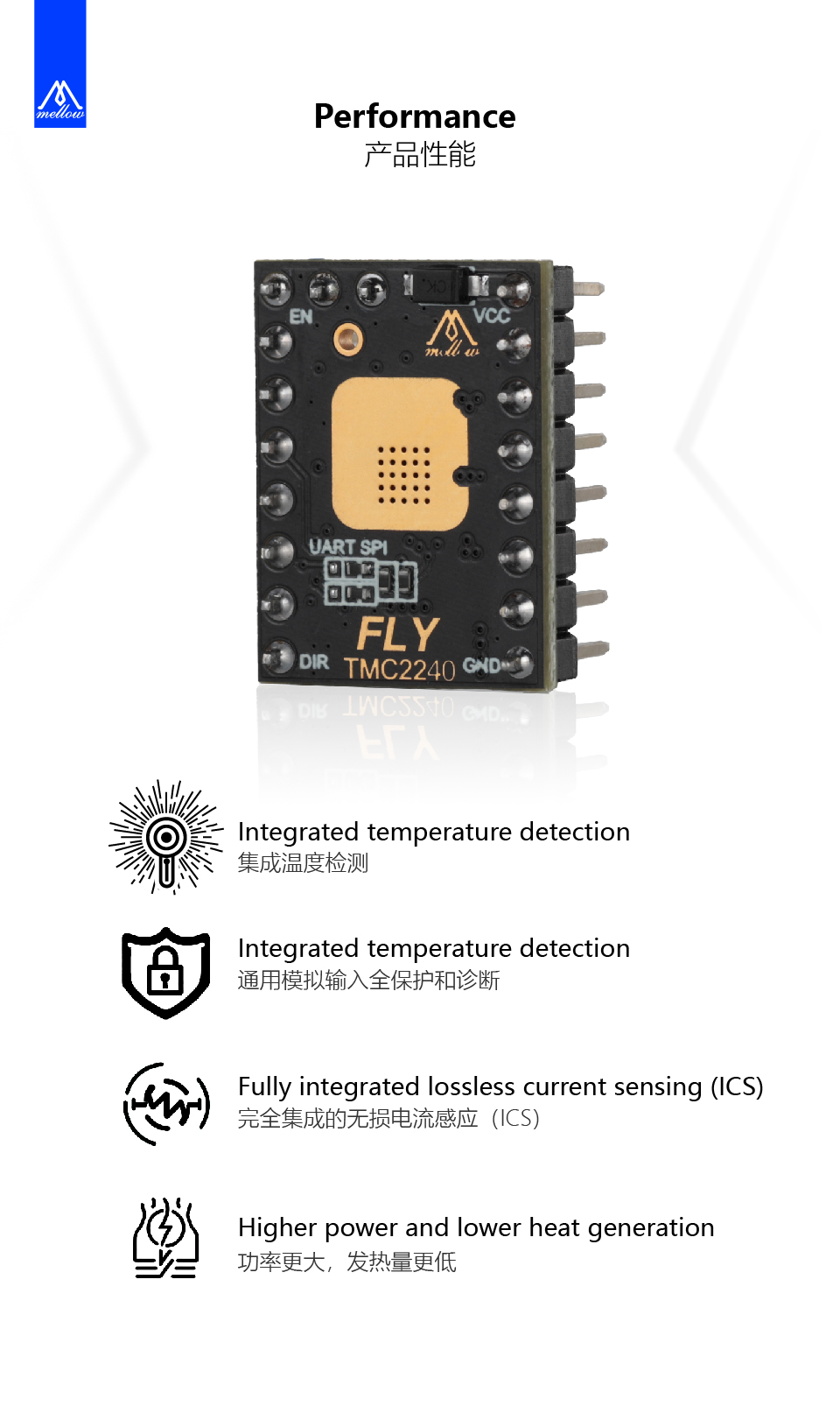
- 集成温度检测
- 通用模拟输入全保护和诊断
- 完全集成的无损电流感应 (ICS)
- 带微步插值 microPlyer 的步进/方向接口
- 短路保护、欠压锁定、芯片过热保护(热关断)
- 支持stallGuard2高精度无传感器电机负载检测
- 集成StallGuard2 和 StallGuard4 无传感器电机负载检测
- StealthChop 和 SpreadCycle 的无抖动组合,解决了斩波切换速度点的电机跳动问题。
- 功率更大,发热量更低。(支持更大电压,3.0AMAX,适用于更高领域的3D打印工作,及更长时间工作不易发热及损坏。)
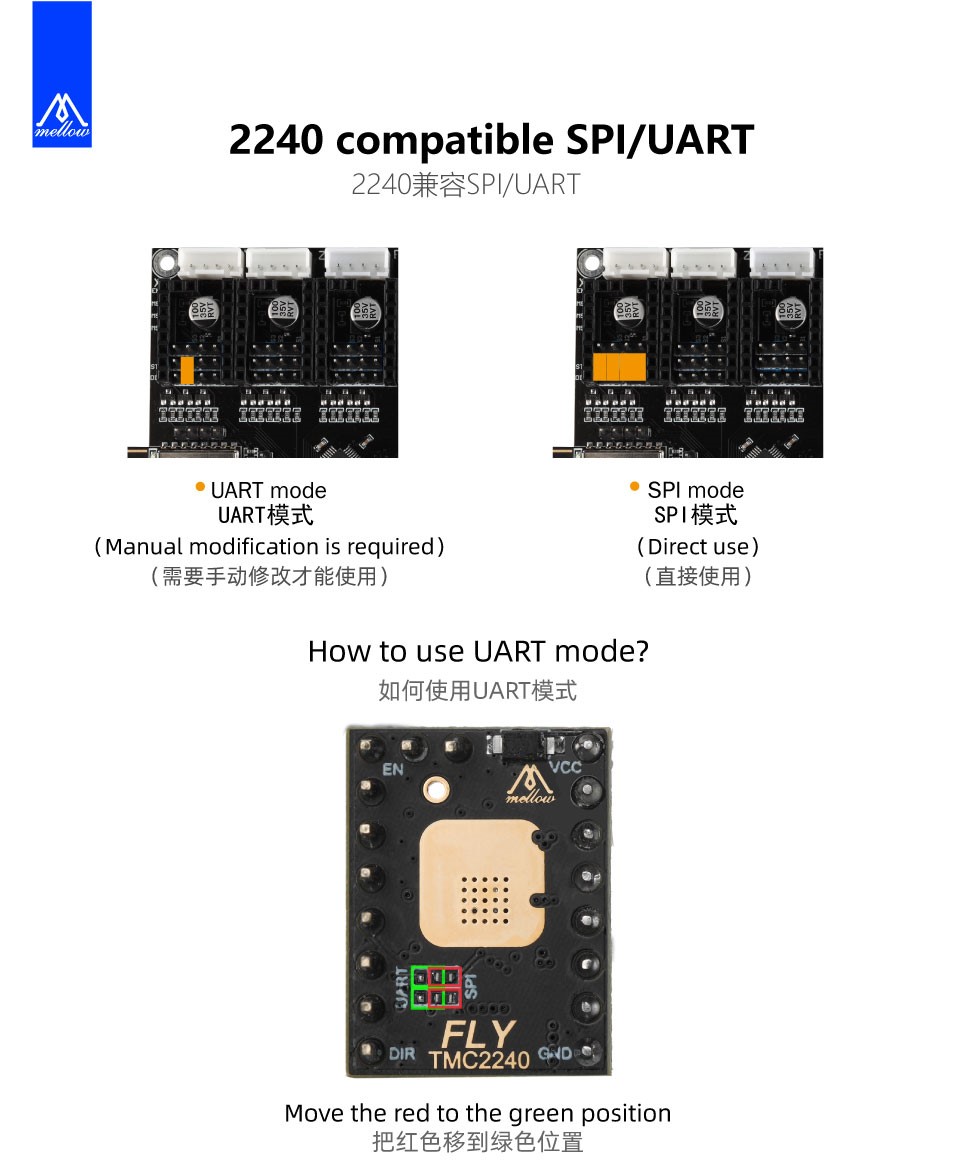
主板跳线说明
- TMC2240默认使用SPI跳线
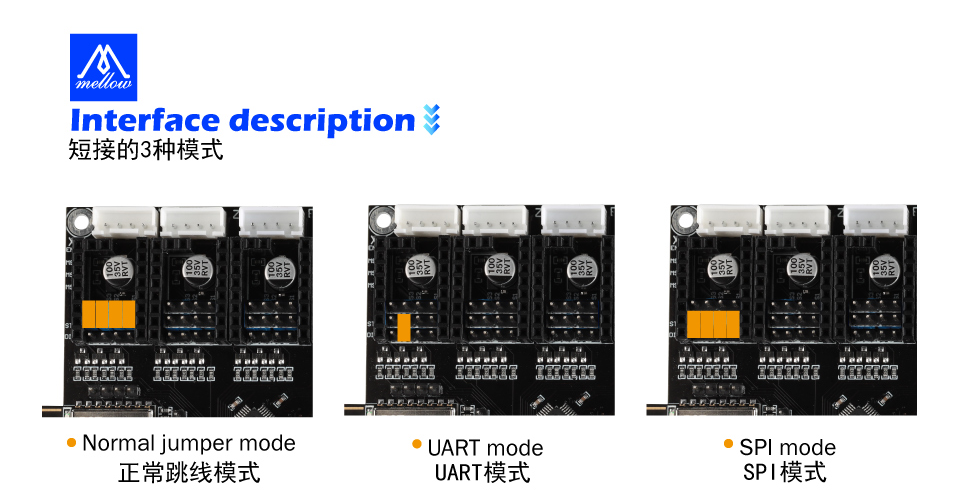
- TMC2240使用UART跳线方法
TMC2240参考配置
danger
驱动采样电阻是rref: 12300请不要设置错误
SPI模式参考配置
[tmc2240 stepper_x]
cs_pin:
spi_bus:
run_current: 0.65 # 电机运行电流值
interpolate: False # 是否开启256微步插值(不建议开启)
rref: 12300
stealthchop_threshold: 0 # 静音阀值(如果不需要静音,请将数值改为0)
UART模式参考配置
[tmc2240 stepper_x]
uart_pin:
run_current: 0.65 # 电机运行电流值
interpolate: False # 是否开启256微步插值(不建议开启)
rref: 12300 # 驱动采样电阻
stealthchop_threshold: 0 # 静音阀值(如果不需要静音,请将数值改为0)
-
如果出现下方报错

-
需要在SSH终端下登录到安装了klipper的用户下然后执行此代码
sed -i 's/"uart_pin"/\'"'"'uart_pin'\''/g' ~/klipper/klippy/extras/tmc2240.py
无限位使用说明
无限位使用提示
- 无限位使用需要占用一个限位口,正常情况是一号驱动位使用IO1,二号驱动位使用IO2以此类推
- 使用无限位需要注意,请不要在对应的限位口接入任何东西
- FLY部分主板是直连驱动口,请注意DIAG是否直连对应引脚
无限位使用提示
- 原来的
endstop_pin:需要屏蔽或者删除,在添加endstop_pin: tmc2240_stepper_x:virtual_endstop - 配置
diag0_pin:后刷新限位状态是未触发 - 配置
driver_SGT:需要自行测试一个合适的值正常为1
- 参考配置
[stepper_x]
# endstop_pin:PF3 # 需要将原来的限位口屏蔽或者删除
endstop_pin: tmc2240_stepper_x:virtual_endstop
homing_retract_dist: 0 # 回退不改0可能会导致归位失败
[tmc2240 stepper_x]
diag0_pin: ^!PG12
driver_SGT: 1